Virtuelle Planung
Stellen Sie Ihre individuelle Fahrzeugeinrichtung zusammen.

Leitender Wissenschaftler Dr. Daniel Dücker im ausgebauten Laderaum des SVan auf Basis eines Hyundai Staria. Von hier lassen sich die Einsätze der Roboter überwachen und auswerten.
Den Zustand unserer Umwelt zu überwachen, zu schützen und zu verbessern ist eine Herkulesaufgabe, der eine Technologie allein nicht gewachsen ist. Mit dem SVan vernetzt das MIRMI der Technischen Universität München eine Vielzahl hochtechnisierter Entwicklungen zu einem leistungsfähigen Gesamtkonzept. Als Kommunikationszentrale schafft der ausgebaute Hyundai Staria Verbindungen zwischen unterschiedlichen Robotern, dem Einsatz von KI sowie Menschen aus aller Welt – und wird so zum mobilen Hub.
Auf einen Blick:

Der SVan mit Land- und Unterwasserrobotern sowie einer Drohne. Je nach Terrain und Einsatzziel kann das „Roboterteam“ vielfältig zusammengesetzt sein.
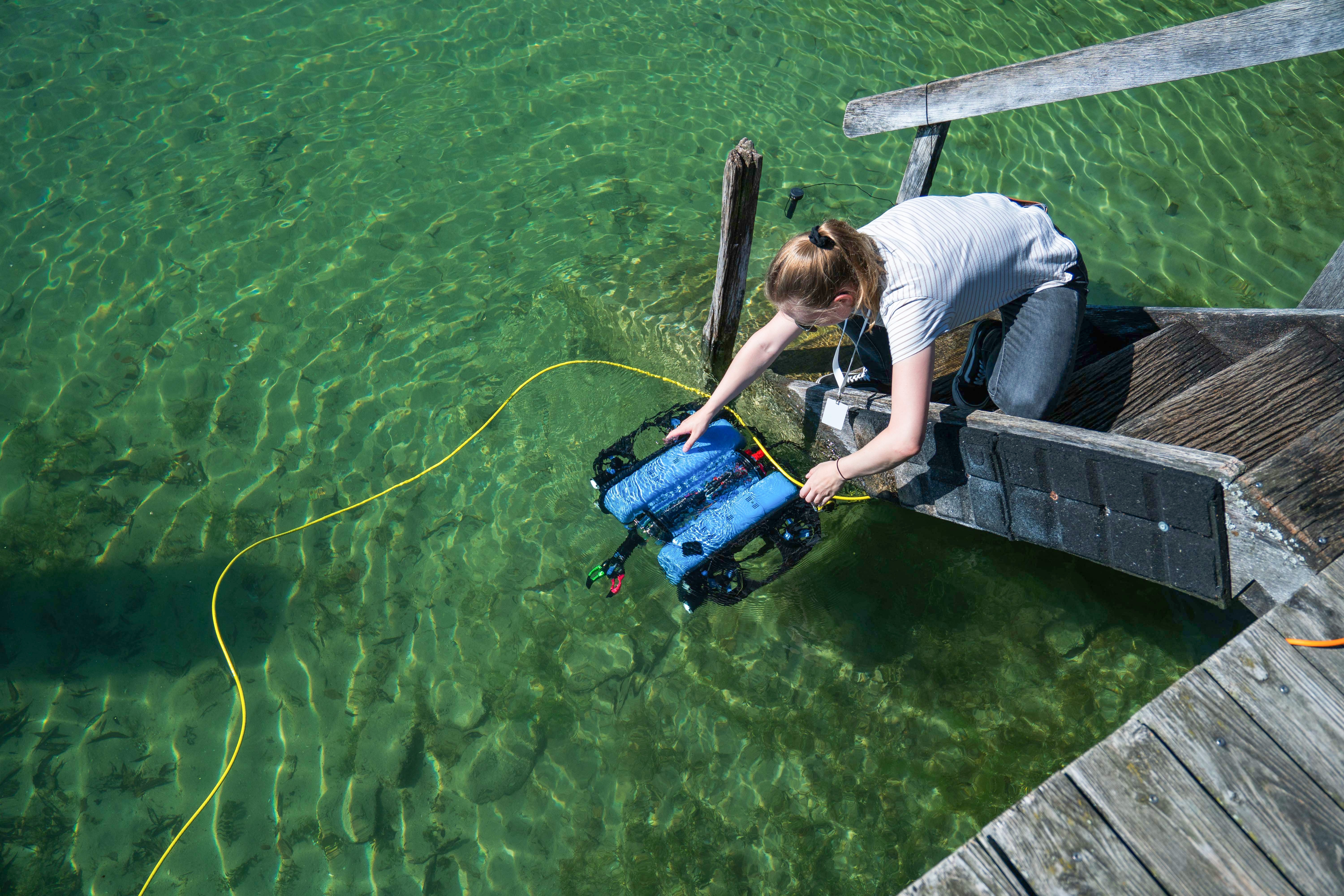
Die grundlegende Idee des SVan-Projekts besteht darin, Ökosysteme wie Wälder und Gewässer mit Hilfe von Robotik und KI zu überwachen und zu reinigen. Umweltexperten und Robotik-Forschende arbeiten Hand in Hand an dieser Vision – und auch die verschiedenen Technologien ergänzen sich dabei zu einem zusammenarbeitenden System, wie in folgendem Beispielszenario: Drohnen untersuchen die Umgebung aus der Luft, deren Daten durch einen Server mit Hilfe künstlicher Intelligenz ausgewertet werden. Ist eine Unregelmäßigkeit ausgemacht, werden je nach Terrain Tauch- oder bereifte Landroboter ausgesandt. Diese beseitigen den identifizierten Unrat – zum Beispiel, indem sie Abfälle einsammeln oder verirrte Fischernetze unschädlich machen.
Auf diese Weise liefern die Roboter – die je nach Einsatzzweck von unterschiedlichster Art sein können – inmitten der Natur wertvolle und praxisnahe Erkenntnisse.
Doch um solche Technologie in der Natur einzusetzen, gilt es eine ernstzunehmende Hürde zu überwinden: Im Gegensatz zu Industrie, Haushalten und Krankenhäusern ist in der Umweltrobotik selbst in unseren Breitengraden eine zuverlässige Infrastruktur nicht selbstverständlich. Ohne Internetverbindung, Stromzufuhr und Rechenleistung lässt sich ein komplexes Zusammenspiel von Robotern kaum koordinieren. Nicht nur wollen die Akkus der Geräte regelmäßig geladen und Daten analysiert werden – in manchen Fällen ist es unabdingbar, die Einsätze per Fernsteuerung zu begleiten, gegebenenfalls auch über Kontinente hinweg. Der SVan bietet die benötigte Infrastruktur in mobiler Form und hilft, die Möglichkeiten der mitgeführten Technologien auszuschöpfen. Im Auftrag des MIRMI haben wir das Fahrzeug dazu beispielsweise mit Gleich- und Wechselstromkreisen, Batterien und mobilem Internet ausgestattet.

Am Einsatzziel angekommen werden die mobilen Roboter dem Laderaum entnommen. Dieser dient anschließend als Arbeitsplatz zur Einsatzkoordination. Photo by Get Flashed Media
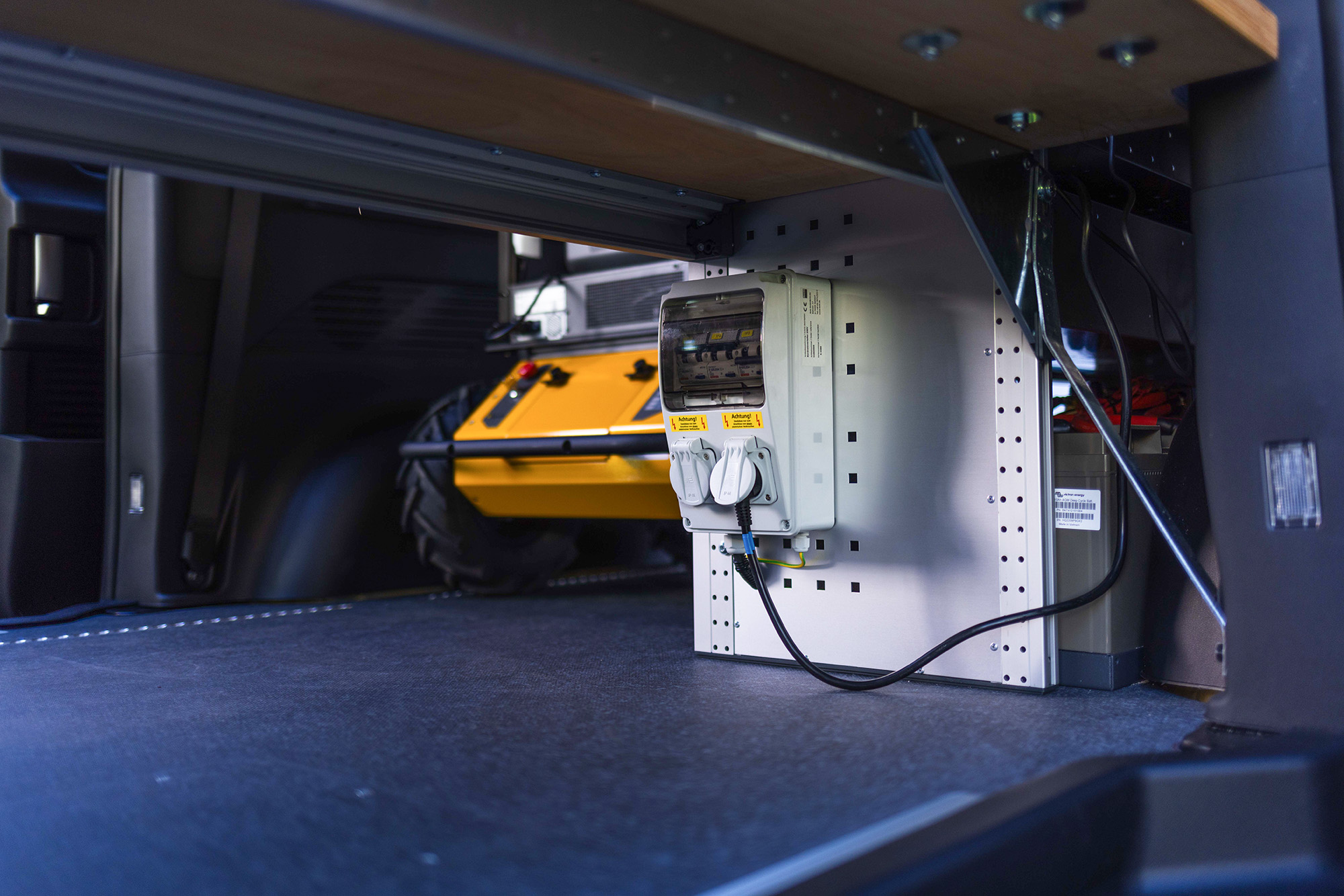
Neben der Fahrzeugeinrichtung haben wir den SVan mit leistungsfähigen Elektrokomponenten ausgestattet. Photo by Get Flashed Media

Der auf der bott vario3 Fahrzeugeinrichtung basierende Arbeitsplatz im SVan. Im Hintergrund an der Seitentür: Ein Roboterarm, der Drohnen das autonome Starten und Landen ermöglichen soll.
„Bei der Einrichtung können wir uns nicht von Anfang an auf eine bestimmte Konfiguration festlegen“, so Dr. Daniel Dücker, leitender Wissenschaftler des Bereichs Umweltrobotik am MIRMI. „Forschung ist ein Prozess, der erst mit der Zeit offenbart, wo welche Komponenten benötigt werden und am besten untergebracht sind.“ Aus diesem Grund schätzt er die Flexibilität der bott vario3 Fahrzeugeinrichtung. Diese erlaubt es, weitere Komponenten anzubauen oder den bisherigen Aufbau zu verändern. Sollten sich im Laufe der Zeit etwa die fest im Laderaum montierten Server an anderer Stelle als praktischer erweisen, lässt sich das leicht umsetzen.
Gleichzeitig darf diese Anpassbarkeit nicht zu Lasten der Standfestigkeit gehen. „Ein Roboter kann durch serielle Kinematik hohe Drehmomente erzeugen. Deshalb schätzen wir besonders die solide Verarbeitung der bott vario3 Fahrzeugeinrichtung“, erklärt Dücker in Bezug auf den Roboterarm, der bei Bedarf starr auf einem Aluminiumsockel hinter der linken Seitentür montiert wird. Für eine verbesserte Bewegungsfreiheit befindet sich diese auf der niedrigeren der beiden mit Tischplatten bestückten Module. „Um präzise Arbeiten zu können, muss der Roboter stets in die gleiche Ausgangsposition zurückfinden. Wäre die Fahrzeugeinrichtung weniger stabil montiert und die Verankerungen weniger belastbar, dann würden sich bereits minimale Abweichungen aufaddieren“, so Dücker.
Auch die vielen Möglichkeiten zur Ladungssicherung lobt der Wissenschaftler: „Die Roboter sind kostspielig und bei falscher Handhabung sehr empfindlich. Einfache und zuverlässige Ladungssicherung ist für uns deshalb Pflicht.“ Verstaut in Kisten werden viele der Komponenten – beispielsweise ein zirka 70 kg schwere Landroboter – mit Hilfe der in den Fahrzeugboden eingelassenen Airline-Schienen verzurrt. Dazu zählt auch der Roboterarm. Dieser darf nicht im auf der Tischplatte montierten Zustand umhergefahren werden, da das die sensible Technik irreparabel beschädigen könnte.
Der SVan als Grundlage eröffnet viele Potenziale für weitere Entwicklungen. Dr. Daniel Dücker erklärt, dass es mehrere Stufen der Autonomie gibt, die das Fahrzeug prinzipiell erfüllen kann – doch je mehr auf menschliche Unterstützung verzichtet werden soll, desto komplexere Entwicklungen sind erforderlich.
Schon jetzt ist das System hochfunktional und arbeitet mit fortschrittlichen Automatismen. Dennoch ist zumindest eine Person für viele Abläufe notwendig. Diese kümmert sich um die Ladungssicherung, fährt den Hyundai Staria zum Einsatzort, übernimmt den Auf- und Abbau und überwacht die Einsätze der Roboter. Hinzu kommt, dass die kleinen Helfer hin und wieder ganz grundlegende Bedürfnisse haben – etwa das sichere Landen, Starten und den Akkuwechsel.
Folgeprojekte, die auf dem SVan aufbauen, sollen die autonomen Möglichkeiten weiter steigern. Eine der jüngsten Entwicklungen ist beispielsweise eine Landeplattform für Drohnen. Befestigt an dem bereits erwähnten Roboterarm, bewegt sich diese so, dass die Fluggeräte sicher und vollautomatisch landen können. Möglich wird das durch Kameras und der Berechnung von Windverhältnissen in Echtzeit. Im Anschluss bewegt sich die Plattform zum Akkutausch in den Laderaum.

Der SVan ist in der Natur bestens vernetzt – sowohl mit den örtlich agierenden Robotern und Drohnen als auch mit Forschenden, die sich international zuschalten können.
Dr. Daniel Dücker gibt jedoch zu bedenken, dass völlige Autonomie nicht allein Sache technischer Raffinesse ist: „Nicht immer ist vollständige Autonomie überhaupt gewünscht – es gilt den jeweiligen Einsatzzweck sowie rechtliche und moralische Rahmenbedingungen zu bedenken. Auch die Meinung der Gesellschaft spielt eine Rolle – manches wird gutgeheißen und akzeptiert, anderes nicht. Unser Ziel ist es in diesem Rahmen bereits heute mit Robotern den Umweltschutz zu unterstützen“
Auch in absehbarer Zeit werden also vermutlich keine Fahrzeuge mit autonomen Roboterteams komplett ohne menschliche Unterstützung durch unsere Naturschutzgebiete streifen. Trotzdem sind auch die noch von Menschen gesteuerten Technologien High-Tech: Je nach Bedarf können sich beispielsweise zusätzliche Bediener von überall auf der Welt zuschalten, um Roboter fernzusteuern, zu beobachten oder Einsatzentscheidungen zu treffen.
Sowohl der Hyundai Staria selbst als auch der Fahrzeugausbau wurden von Hyundai Motor Europe finanziert. Dabei handelt es sich genaugenommen um die Pkw-Version des Fahrzeugmodells. Der Vorteil: mehr Sonnenlicht im Laderaum durch die zusätzlichen Fenster. Der Ausbau erforderte allerdings besondere Aufmerksamkeit und macht sich die vorhandenen Zurrmöglichkeiten des ursprünglichen Familienautos zu Nutze. „Der Ausbau verlief dennoch sehr zügig“, urteilt Dücker. „Da können wir uns nur bedanken, das hat wirklich gut geklappt.“
Passend zum Roboter-fokussierten Einsatzzweck punktet das zwischenzeitlich auch als Kastenwagen verfügbare Fahrzeugmodell natürlich mit seinem futuristischen Äußeren. Aber auch ganz praktische Aspekte sprechen für den Hyundai Staria als Plattform des SVan: Die Schiebetüren auf beiden Seiten bieten besondere Zugänglichkeit: Die linke Tür zum Laderaum ist dem Roboterarm vorbehalten, um Drohnen zu empfangen und auszusenden. Das Heck bietet sich für die Rampe des geländegängigen Landroboters an. Die rechte Schiebetür gewährt schließlich auch den menschlichen Mitarbeitenden einen Einlass.
„Auch die Ausmaße des Hyundai Staria sind für unsere Zwecke ideal“, so Dücker. „Er ist groß genug für unsere Anforderungen und bleibt dabei so kompakt wie möglich.“ Dadurch lässt sich das Fahrzeug weder von verwinkelten Waldwegen noch von niedrigen Parkhauseinfahrten aufhalten.
Auch wenn es momentan zu früh ist, um ein System wie den SVan der freien Marktwirtschaft anzubieten, sieht Dr. Daniel Dücker bereits verschiedene mögliche Einsatzszenarien. Diese schließen den Naturschutz ein, gehen aber auch darüber hinaus – ein Beispiel ist die Überwachung von Bauwerken wie Brücken und Windkraftwerken sowie überall dort, wo ein direkter Zugriff durch den Menschen zu gefährlich ist.
Wir wünschen dem Munich Institute of Robotics and Machine Intelligence und der Technischen Universität München weiterhin gute Fahrt mit dem SVan – und, dass dieser noch für viele weitere spannende Erkenntnisse förderlich ist.
Sie haben ebenfalls ein ganz besonderes Projekt geplant? Wir sind Ihr starker Partner für den Spezialausbau. Kunden aus Wissenschaft, Rettungswesen, Rennsport und Staat vertrauen unserer Expertise. Kontaktieren Sie uns jetzt!